Experimentación de controladores digitales clásicos en
un sistema embebido aplicado en un proceso térmico
Experimentation of classic digital controllers in an
embedded system applied in a thermal process
José Fuentes 1, Sergio Castro2,
Byron Medina3, Francisco Moreno4, Sergio Sepúlveda5
1Grupo de investigación y Desarrollo
en Electrónica y Telecomunicaciones (GIDET), Departamento de electricidad y
electrónica, Universidad Francisco de Paula Santander, Colombia. Email: josefernandofr@ufps.edu.co
2Grupo de investigación y Desarrollo
en Electrónica y Telecomunicaciones (GIDET), Departamento de electricidad y
electrónica, Universidad Francisco de Paula Santander, Colombia. Email: sergio.castroc@ufps.edu.co
3Grupo de investigación y Desarrollo
en Electrónica y Telecomunicaciones (GIDET), Departamento de electricidad y
electrónica, Universidad Francisco de Paula Santander, Colombia. Email: byronmedina@ufps.edu.co
4 Grupo de investigación y Desarrollo
en Electrónica y Telecomunicaciones (GIDET), Departamento de electricidad y
electrónica, Universidad Francisco de Paula Santander, Colombia. Email: femgarcia@ufps.edu.co
5Grupo de investigación y Desarrollo
en Electrónica y Telecomunicaciones (GIDET), Departamento de electricidad y
electrónica, Universidad Francisco de Paula Santander, Colombia. Email:
sergio.sepulveda@ufps.edu.co
Recibido: Mayo 15, 2017. Aceptado: Agosto 11, 2017. Versión Final: Septiembre 28, 2017.
RESUMEN
Este proyecto de investigación muestra la
implementación de controladores digitales clásicos dentro de un sistema
embebido para controlar la temperatura de un sistema térmico. El sistema
embebido seleccionado fue el computador de placa reducida Raspberry Pi 2 B+
junto con una tarjeta Arduino UNO. En la etapa de medición se desarrolló el
hardware para transmitir los datos de la temperatura desde la termorresistencia
PT-100 hacia la Raspberry Pi. Para la etapa de implementación computacional se
desarrolló un algoritmo para los diferentes controladores y con base en este,
se programaron los controladores en Python 2.7. Para el actuador se diseñó una
etapa de potencia que convierte el voltaje ac en un voltaje dc, a partir de una
señal PWM. Este voltaje dc se utiliza para alimentar una resistencia térmica
que es la que se encarga de ejecutar la acción de control del sistema. Con la
implementación de los tipos de controladores se realizó un análisis comparativo
destacando las características más relevantes del sistema para cada tipo de
controlador y permitiendo evaluar también el rendimiento de la Raspberry Pi.
Con base en los resultados obtenidos en la ejecución del proyecto, se concluye
la viabilidad para controlar sistemas térmicos bajo diferentes tipos de controladores
embebidos en la Raspberry Pi y con la posibilidad de desarrollar estrategias de
control inteligente para futuros proyectos, a través de herramientas de
software y hardware libre.
PALABRAS
CLAVE: Arduino UNO;
controlador PID; raspberry Pi; sistema térmico.
ABSTRACT
This research project shows the implementation of classic digital controllers in an embedded system to control the temperature of a thermal system. The embedded system selected was in the computer board Raspberry Pi 2 B+ together with an ONE Arduino board. In the measurement stage the hardware was developed for
to transmit the temperature data from the PT-100 thermometer resistance towards the Raspberry PI.
For the implementation of the computational stage was developed an algorithm for the different controllers and based on this the controllers were programmed in Python 2.7. For the actuator a power stage was designed that converts the ac voltage into a voltage dc, from a PWM signal. This dc voltage is used to feed a thermal resistance that is responsible for executing the control action of the system. With the implementation of the types of controllers, a comparative analysis was realized highlighting the most relevant characteristics for each type of controller and allowing to also evaluate the performance of the Raspberry Pi. Based on the results obtained in the execution of the project, it concluded the feasibility to control thermal systems under different types of controllers embedded in the Raspberry Pi and with the possibility of developing intelligent control strategies for futures projects,
through the use of software tools and free hardware.
KEYWORDS: ONE arduino; PID controller;
raspberry Pi; thermal system.
INTRODUCCIÓN
El rápido crecimiento de nuevas tecnologías
en la creación de circuitos integrados, ha permitido la fabricación de nuevos
dispositivos de una gran capacidad electrónica, mucho más pequeños y de mayor
capacidad de cómputo en comparación con algunos años atrás. Un ejemplo de esto
es el computador de placa reducida (SBC por sus siglas en inglés) conocido como
Raspberry Pi, el cual presenta las características de un computador normal,
pero de menor capacidad de hardware en comparación a equipos de cómputo comerciales,
pero que son lo suficientemente justas como para ejecutar un sistema operativo
y aplicaciones creadas por el usuario. Esta capacidad de cómputo junto con el
puerto de entradas y salidas de propósito general (GPIO) perfila a la Raspberry
Pi como un potente dispositivo capaz de interconectarse con otro hardware a
través de protocolos como el I2C, Serial, entre otros que maneja. Por otro
lado, la necesidad de aplicar control a distintos tipos de procesos, hace que
la Raspberry Pi pueda considerarse como una solución alternativa, a pesar de
que su uso no estuviese destinado para tal fin, a dispositivos que comúnmente
son utilizados en este ámbito. Además, el hecho de que su software sea de
código abierto, da valor agregado a la idea de implementar controladores
embebidos en ella.
Aunque la Raspberry Pi se lanzó
oficialmente al mercado a principios del 2012 [1] y su uso está destinado
principlamente a incentivar la enseñanza a cualquier persona que quiera
aprender a programar [2], esto no ha sido impedimento para desarrollar
aplicaciones que necesitan de gran capacidad de cálculo o aplicaciones que
necesiten la interacción con hardware externo. Por ejemplo, en Colombia se han
desarrollado propuestas como el desarrollo de un Control Adaptativo para optimizar
una intersección semafórica en un sistema embebido [3], en donde se embebió el
controlador adaptativo en la Raspberry Pi modelo B+ y se llevaron a cabo
simulaciones de cómo se comporta el algoritmo en los sistemas de regulación
vial, en [17] se utilizó la Raspberry Pi como sistema embebido de acuerdo a su
capacidad de comunicación y de control, con la finalidad de implementar un
sistema de distribución residencial, el cual permite controlar el flujo de
energía entre diferentes fuentes de energía y las cargas de una vivienda. A
nivel internacional también existen propuestas como la desarrollada por A. Gosh
[4] en India, en la cual se evalúa la capacidad de desarrollar e implementar
sistemas de control de bajo costo en la Raspberry Pi; básicamente es un laboratorio
educativo en el área de control, [5] en Eslovaquia desarrollaron un laboratorio
de bajo costo, cuyos experimentos se enfocaron en controlar remotamente tres
procesos diferentes, a través de un servidor implementado en la Raspberry Pi;
en el proyecto RapiBaBot [6] desarrollado en los Estados Unidos, se controla la
estabilidad para un sistema de péndulo invertido mediante la Raspberry Pi y su
puerto GPIO, que junto con un acelerómetro digital, se logra controlar la
estabilidad de una estructura mecánica bajo el principio del péndulo
invertido; y finalmente en Ecuador se desarrolló un proyecto [7] en el cual
modelan una planta y se utiliza Octave junto con Python y C++ para evaluar el
rendimiento del software en el control de velocidad para un motor DC aplicando
estrategias de control analógico clásico.
En este trabajo se propone la comparación
de controladores digitales clásicos, en este caso, controladores P, PI y PID,
embebidos en la Raspberry Pi modelo 2 B+ para el control de temperatura de una
planta térmica. Se utilizó una tarjeta Arduino UNO como conversor analógico
digital (ADC) y como conversor digital analógico (DAC), que se comunica con la
Raspberry Pi mediante el protocolo I2C; y una pantalla táctil HDMI para
visualizar la interfaz gráfica del controlador. La eficiencia del sistema se
evaluó mediante la comparativa de los tres tipos de controlador implementados y
del rendimiento del procesador de la Raspberry Pi.
El artículo está organizado de la siguiente
manera: el marco teórico utilizado para abordar el problema; la narrativa del
proceso en la cual se explica el banco experimental sobre el cual se desarrolló
el proyecto, el modelamiento de la planta térmica y el diseño y la
implementación de los controladores digitales embebidos; posteriormente en la
sección de resultados se compara el comportamiento del sistema de acuerdo a
cada tipo de controlador y destacando las características más relevantes de
cada uno de ellos y el rendimiento del procesador de la Raspberry Pi; y
finalmente las conclusiones del trabajo.
MARCO TEÓRICO
En los procesos industriales, más del 97 %
de los controladores reguladores son del tipo PID [8]. Su popularidad se debe a
la simplicidad del ajuste de sus parámetros y al hecho de estar disponible en
casi todos los equipos de control de la industria. Un controlador PID calcula
inicialmente el “error”, entre su variable controlada (medida) y su valor
deseado (setpoint) y en función de este error genera una señal de control para
eliminar el desvío probable [9]. El algoritmo PID usa el “error” en tres
módulos distintos para producir su salida o variable manipulada. Los nombres
proporcional (P), integral (I) o derivativo (D), son usados para definir los
principales controles usados en la práctica:
• Controlador proporcional (P)
• Controlador proporcional integral (PI)
• Controlador proporcional integral
derivativo (PID)
Controlador P
La salida de este controlador es
proporcional al error  . El factor de proporcionalidad es llamado ganancia del controlador
[9]. Este controlador se define matemáticamente como:
. El factor de proporcionalidad es llamado ganancia del controlador
[9]. Este controlador se define matemáticamente como:
En el control proporcional existe una
relación lineal entre el valor de la variable controlada y la posición del
elemento final de control [10]. La ecuación (1) es la expresión para cualquier
controlador P continuo, pero si se expresa en términos discretos dicha ecuación
se llega a la expresión de un controlador P digital:
En donde  es la ganancia proporcional del controlador.
es la ganancia proporcional del controlador.
Controlador PI
Este controlador genera su salida
proporcional a la integral del error.
Las características más relevantes del
controlador PI: es que para un error en escalón (pulso), la acción integral
será la integral del escalón que es una rampa. La acción integral aumenta o
disminuye la salida del controlador indefinidamente hasta que el error se
elimine [9]. La ecuación (3) corresponde al controlador PI continuo,
de dicha expresión se puede expresar en términos discretos el término integral
para hallar una ecuación de un controlador I digital:
Donde  , siendo
, siendo  la ganancia proporcional,
la ganancia proporcional,  el tiempo de muestreo del controlador digital y
el tiempo de muestreo del controlador digital y  el tiempo integral, y el término
el tiempo integral, y el término  se refiere al resultado del valor del cálculo de la acción de
control anterior. Con las ecuaciones (2) y (4) se puede definir la ecuación para un
controlador PI digital:
se refiere al resultado del valor del cálculo de la acción de
control anterior. Con las ecuaciones (2) y (4) se puede definir la ecuación para un
controlador PI digital:
Controlador PID
Este controlador genera su salida
proporcional al error, a la integral del error y a la derivada del error.
La acción derivativa tiene como finalidad
“anticipar hacia dónde va el proceso”, mediante la observación de la rapidez en
el cambio del error [10]. La ecuación (6) corresponde a la expresión de un
controlador PID continuo, de dicha expresión se puede expresar en términos
discretos el término derivativo para hallar una expresión de un controlador D
digital:
Donde  , siendo la ganancia proporcional, el tiempo de muestreo del controlador digital y
, siendo la ganancia proporcional, el tiempo de muestreo del controlador digital y  el tiempo derivativo, y el término
el tiempo derivativo, y el término  que se refiere al error anterior. Con las ecuaciones (2), (4) y (7) se puede definir la ecuación para un
controlador digital:
que se refiere al error anterior. Con las ecuaciones (2), (4) y (7) se puede definir la ecuación para un
controlador digital:
NARRATIVA DEL PROCESO
Los pasos mencionados a continuación
describen el banco experimental que se utilizó para la realización del
proyecto, el modelamiento de la planta a partir de datos experimentales, y el
diseño e implementación de los controladores clásicos embebidos en la Raspberry
Pi.
Banco Experimental
El propósito del controlador embebido es el
de controlar cualquier sistema, pero en el caso de desarrollo de este proyecto,
se implementó el controlador con el fin de ejecutar la acción de control
sobre un sistema térmico,
Figura 1. el cual es un horno a pequeña
escala, que tiene por elemento calefactor una resistencia térmica tipo cartucho
para un voltaje nominal de  y una potencia eléctrica de
y una potencia eléctrica de  ; para medir la temperatura dentro del horno, se utilizó un termorresistor
PT-100, el cual va conectado a un transmisor de temperatura de referencia
Sitrans TH-100.
; para medir la temperatura dentro del horno, se utilizó un termorresistor
PT-100, el cual va conectado a un transmisor de temperatura de referencia
Sitrans TH-100.
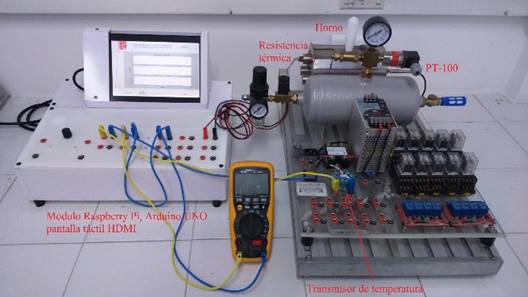
Figura 1. Módulo de
control y planta térmica. Fuente. Elaboración propia.
El transmisor está programado para medir un
rango de temperatura entre  , y para entregar una señal de corriente proporcional a la
temperatura de
, y para entregar una señal de corriente proporcional a la
temperatura de  . La señal de corriente
generada por el transmisor es convertida en una señal de voltaje dc de
. La señal de corriente
generada por el transmisor es convertida en una señal de voltaje dc de  por un potenciómetro de precisión que se calibra en un valor de
por un potenciómetro de precisión que se calibra en un valor de  . Esta señal de voltaje es leída por la Raspberry Pi mediante un
canal analógico del Arduino UNO; la Raspberry Pi y el Arduino UNO se comunican
por el protocolo I2C, siendo la Raspberry Pi el maestro y el Arduino UNO el
esclavo.
. Esta señal de voltaje es leída por la Raspberry Pi mediante un
canal analógico del Arduino UNO; la Raspberry Pi y el Arduino UNO se comunican
por el protocolo I2C, siendo la Raspberry Pi el maestro y el Arduino UNO el
esclavo.
En la Raspberry Pi se encuentra embebido el
controlador, programado en Python versión 2.7, junto con la interfaz gráfica,
en la cual se puede observar el comportamiento del sistema de control, esto se
logra a través de tres gráficas, las cuales son el error del sistema, la acción
de control y la temperatura medida. Una vez que la Raspberry recibe el valor de
la temperatura, el programa en Python se encarga de calcular la acción de
control de acuerdo al tipo de controlador que se esté utilizando, para luego
enviar la acción de control al Arduino UNO, el cual genera una señal de PWM
proporcional a dicha acción de control. El PWM opera a una frecuencia de  , el ciclo de trabajo útil varía entre el
, el ciclo de trabajo útil varía entre el  , esto con el fin de no exceder los límites de voltaje para la
resistencia térmica. Esta señal PMW es inyectada a un convertidor AC-DC, el
cual consta de una etapa de rectificación, una etapa de filtrado y la etapa de
regulación. La rectificación se hace mediante un puente rectificador de diodos;
el filtrado se hace mediante un condensador electrolítico; y la regulación se
realiza con un Mosfet de potencia con referencia IRF630, el cual es disparado
por la señal PWM generada por el Arduino UNO; esta etapa hace que el ciclo de
trabajo útil de la señal PWM genere un voltaje dc proporcional entre
, esto con el fin de no exceder los límites de voltaje para la
resistencia térmica. Esta señal PMW es inyectada a un convertidor AC-DC, el
cual consta de una etapa de rectificación, una etapa de filtrado y la etapa de
regulación. La rectificación se hace mediante un puente rectificador de diodos;
el filtrado se hace mediante un condensador electrolítico; y la regulación se
realiza con un Mosfet de potencia con referencia IRF630, el cual es disparado
por la señal PWM generada por el Arduino UNO; esta etapa hace que el ciclo de
trabajo útil de la señal PWM genere un voltaje dc proporcional entre  .
.
Este voltaje dc se utiliza para alimentar
la resistencia térmica del horno. A través de la pantalla HDMI se selecciona la
temperatura de referencia, y se supervisa el estado del controlador en tiempo
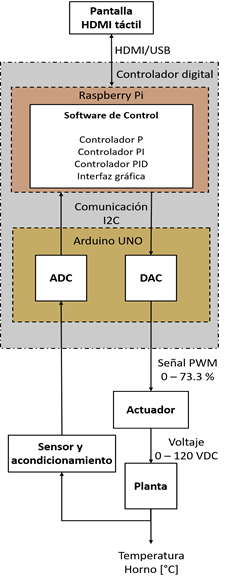
real. En la Figura 2 se puede observar el diagrama de bloques del sistema de
control desarrollado en el proyecto.
Figura 3. Datos recolectados y
estimación del modelo de la planta. Fuente. Elaboración propia.
Con el fin de mantener la simplicidad, el
sistema se modela como una planta de primer orden con retardo (POR) [10]. La
función de transferencia para dicho modelo está dada por:
En donde  es la ganancia de la planta,
es la ganancia de la planta,  es la constante de tiempo y
es la constante de tiempo y  es el tiempo muerto.
es el tiempo muerto.
Con los datos recolectados y el System
Identification, se obtiene una función de transferencia para una planta de
sistema de primer orden con retardo, con las siguientes características:
En dónde sí se compara la ecuación (10) con la ecuación (9) se tiene que la ganancia de la planta es
 la cual indica cuánto
cambia la variable de la salida por una unidad de cambio en la función de la
variable de entrada [14]. La constante de tiempo es
la cual indica cuánto
cambia la variable de la salida por una unidad de cambio en la función de la
variable de entrada [14]. La constante de tiempo es  la cual guarda relación con la velocidad de respuesta del proceso
[14]. El tiempo muerto es
la cual guarda relación con la velocidad de respuesta del proceso
[14]. El tiempo muerto es  , el cual indica el tiempo que se demora en cambiar la variable
controlada ante un cambio en la entrada del actuador.
, el cual indica el tiempo que se demora en cambiar la variable
controlada ante un cambio en la entrada del actuador.
El modelo de la función de transferencia
presentado en la ecuación (10) es una aproximación de los datos
recolectados y presentados en la Figura 3. Este modelo de la función de
transferencia tiene una estimación del  respecto a los datos experimentales recolectados.
respecto a los datos experimentales recolectados.
Cálculo e
implementación de los controladores
Para calcular los controladores P, PI y
PID, se utilizó la herramienta PID Tuner [15] de Matlab, puesto que como
se mencionó en la parte del modelamiento de la planta, el sistema es un sistema
sin autorregulación [12], con lo cual, los métodos convencionales para
sintonizar controladores PID como reguladores [16], no se pudieron aplicar. En
este caso, los parámetros calculados para los controladores se muestran en la Tabla 1. Estos parámetros regulan la planta
para operar en el rango de medición del sensor y garantizan la estabilidad del
sistema.
Tabla 1. Ganancias para los controladores. Fuente. Elaboración propia
|
Controlador
|
|

|

|
|
P
|
7.5831
|
-
|
-
|
|
PI
|
7.7942
|
0.00087944
|
-
|
|
PID
|
8.1623
|
0.00096398
|
29.2527
|
De la Tabla 1 se puede observar que las ganancias
proporcionales aumentan en los controladores PI y PID respecto a la ganancia
del controlador P, esto con el fin de disminuir el error de estado estacionario
[14], pero sin llegar a desestabilizar el sistema. En cuanto a la ganancia
integral, su finalidad es eliminar la desviación presentada por la ganancia
proporcional y que la respuesta del controlador sea más rápida [14], con lo
cual, se espera que el controlador PID responda de manera más rápida que el
controlador PI, puesto que la ganancia integral del controlador PID es mayor.
En el caso de la acción derivativa, se utiliza para dar al controlador la
capacidad de anticipar hacia dónde va el proceso [14], para este caso, una
ganancia derivativa grande, hace que el controlador se anticipe mucho más
rápido respecto a una ganancia derivativa menor.
Las ganancias de la Tabla 1, se utilizan en el cálculo de la
acción de control presentado en las ecuaciones (2), (5) y (8) para
controladores P, PI y PID respectivamente.
Para implementar el control en la Raspberry
Pi, se tiene en cuenta el algoritmo descrito a continuación, en el cual se
muestran las etapas que son ejecutadas secuencialmente por el programa
desarrollado en Python:
• Leer la señal de voltaje correspondiente
a un valor de temperatura, en la entrada analógica del Arduino UNO.
• Realizar el escalamiento y conversión del
voltaje leído en su valor de temperatura, expresado en °C, y almacenar este
valor en una variable del sistema.
• Calcular el error que hay entre la
temperatura deseada (set point) y la temperatura que se está leyendo en el
sensor. Este dato también se almacena en una variable del sistema.
• Se calcula la acción de control
dependiendo del controlador que se desee implementar a partir de las ecuaciones
(2), (5) u (8). El valor de la acción de control es
almacenado en una variable del sistema.
Modelamiento de la
planta
Para realizar el modelamiento de la planta,
se hizo un ensayo experimental basado en el método de la curva de reacción del
proceso [11], el cual consistió en aplicar una señal escalón a la planta y
registrar la dinámica de la temperatura y posteriormente realizar la curva de
reacción del proceso, como se observa en la Figura 3. Como la temperatura
excede el rango de operación del sensor antes de estabilizarse, el proceso no
se puede considerar como auto-regulado [12], con lo cual, no se puede aplicar
el método completo de la curva de reacción [11], por lo tanto, para realizar el
modelamiento de la planta, se utilizó la herramienta System Identification [13]
de Matlab versión 2010, junto con los datos recolectados experimentalmente.
• Si la acción de control es negativa se
debe aplicar un limitador con el fin de evitar que el actuador opere en
condiciones no deseadas. Si la acción de control es mucho mayor al límite
fijado para el actuador, se debe saturar la señal al máximo para evitar que el
actuador opere en condiciones no deseadas.
• Se actualiza la variable que contiene el
error anterior si se está utilizando un controlador PID. Se actualiza la
variable que contiene la acción de control integral anterior para controladores
PI y PID. Si se utiliza un controlador P no es necesario actualizar ninguna de
las dos variables mencionadas anteriormente.
• Finalmente, se envía la acción de control
al actuador mediante la salida por PWM de la tarjeta Arduino UNO.
En la Figura 4 se puede observar el diagrama de
flujo del algoritmo para ejecutar el controlador.
Cabe resaltar, que este algoritmo es
ejecutado cada , el cual se había
definido como periodo de muestreo. Este periodo de muestreo está implícito en
las ganancias de los controladores como se puede observar en las ecuaciones (4) y (7). En el proyecto se utilizó un periodo de
muestreo de  , el cual es suficiente para calcular y realizar la acción de
control del sistema térmico.
, el cual es suficiente para calcular y realizar la acción de
control del sistema térmico.
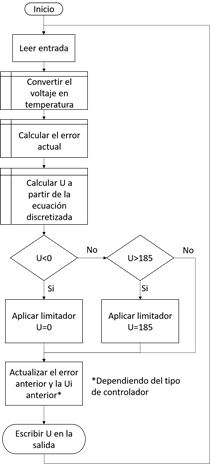
Figura 4. Diagrama de flujo del algoritmo de control. Fuente. Elaboración
propia.
Paralelamente, se ejecuta dentro del
sistema embebido otro algoritmo, el cual utiliza los datos que se recolectan en
el algoritmo del controlador, y los utiliza para graficar en tiempo real la
evolución de la variable del error, de la acción de control y de la temperatura
dentro del horno. Este algoritmo se ejecuta cada segundo permitiendo realizar
la supervisión del sistema térmico en tiempo real desde la pantalla HDMI.
Los dos algoritmos mencionados
anteriormente, se ejecutan desde un programa principal, el cual se desarrolló
en Python 2.7, junto con las bibliotecas smbus, time, RPi.GPIO y matplotlib.
RESULTADOS
Para evaluar el desempeño de la Raspberry
Pi se realizaron pruebas, implementado los tres tipos de controladores y se
utilizó una temperatura de referencia de  para posteriormente comparar los
resultados obtenidos de cada controlador. Se observaron las características de
cada controlador tanto en la temperatura, el tiempo de establecimiento y la
acción de control entregada al actuador. También se evaluó el rendimiento del
sistema embebido en cuanto al tiempo de ejecución del algoritmo y el uso de la
capacidad de procesamiento de la CPU al ejecutar el programa.
para posteriormente comparar los
resultados obtenidos de cada controlador. Se observaron las características de
cada controlador tanto en la temperatura, el tiempo de establecimiento y la
acción de control entregada al actuador. También se evaluó el rendimiento del
sistema embebido en cuanto al tiempo de ejecución del algoritmo y el uso de la
capacidad de procesamiento de la CPU al ejecutar el programa.
Temperatura
Para comparar la temperatura de los
tres tipos de controlador, se estableció como parámetro de referencia una
temperatura de  . En la Figura 5 se puede
observar la comparación de la temperatura de salida de acuerdo a cada tipo de
controlador.
. En la Figura 5 se puede
observar la comparación de la temperatura de salida de acuerdo a cada tipo de
controlador.
De la Figura 5 se dedujo el tiempo muerto, el
tiempo de asentamiento, la constante de tiempo y la temperatura final del
sistema. En la Tabla 2 se
presentan estos parámetros para cada tipo de controlador. El parámetro representa la constante de tiempo,  representa el tiempo de retardo,
representa el tiempo de retardo,  representa el tiempo de asentamiento para un valor del 2 % de la
variable controlada y
representa el tiempo de asentamiento para un valor del 2 % de la
variable controlada y  representa la temperatura final en la cual el sistema se
estabilizó.
representa la temperatura final en la cual el sistema se
estabilizó.
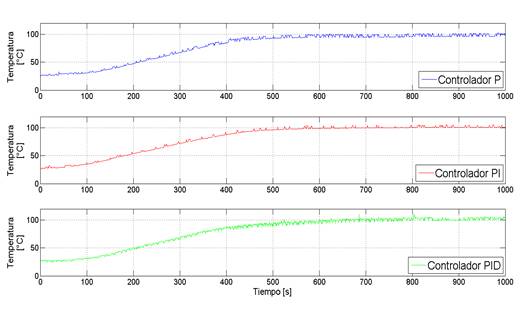
Figura 5. Temperatura del proceso térmico para los tres tipos de
controladores. Fuente. Elaboración propia.
Tabla 2. Parámetros del sistema para cada controlador implementado.
|
Tipo de controlador
|
Parámetro
|
|
|
|

|
|
|
P
|
173.2 s
|
70 s
|
600 s
|
97.5 °C
|
|
PI
|
180.6 s
|
70 s
|
534 s
|
100 °C
|
|
PID
|
188 s
|
70 s
|
589 s
|
102 °C
|
Fuente. Elaboración propia.
Acción de control
Para comparar la acción de control
ejecutada por cada controlador, se estableció como parámetro de referencia una
temperatura de  . En la Figura 6 se puede observar la acción de
control expresada en porcentaje de acuerdo a cada tipo de controlador.
. En la Figura 6 se puede observar la acción de
control expresada en porcentaje de acuerdo a cada tipo de controlador.
Figura 6. Acciones de control generadas por los tres tipos de controladores.
Fuente. Elaboración propia.
De la Figura 6 se puede observar que las acciones
de control calculadas por los controladores P y PI son atenuadas y presentan
picos pequeños en comparación con la acción de control calculada por el controlador
PID, esto se debe a que el término proporcional que se calcula solamente
utiliza el error presente para calcular la acción de control; en cuanto al
término integral, éste también utiliza el error actual y la acción de control
integral calculada anteriormente para generar la nueva acción de control
integral, estos factores hacen que las acciones de control calculadas por los
controladores P y PI no presenten picos mayores al 20 %. Este fenómeno es
debido al ruido presente en el conversor analógico digital del Arduino UNO. En
cuanto a la acción de control calculada por el controlador PID, se puede
observar que este genera picos de hasta el 100 % de la acción de control, esto
se debe a que el término derivativo del controlador, utiliza el error actual y el
error anterior para calcular la acción de control, eso, sumado a una alta
ganancia derivativa, como la calculada en este controlador (Tabla 1), hace que el controlador amplifique
el ruido generado por el conversor analógico digital del Arduino UNO.
Rendimiento del
sistema embebido
Para evaluar el rendimiento del sistema
embebido, primero se determinó cuánto tiempo tarda en ejecutar completamente el
programa el algoritmo de control, desde que lee la señal del sensor hasta que
le envía la señal a la planta. En la Tabla 3, se observan los tiempos de
ejecución del algoritmo para cada tipo de controlador.
Tabla 3. Tiempo de ejecución del algoritmo de control para cada tipo de
controlador.
|
Controlador
|
Tiempo de ejecución (ms)
|
|
P
|
2.550
|
|
PI
|
2.374
|
|
PID
|
2.585
|
Fuente. Elaboración propia.
Como se puede observar en la Tabla 3, los tiempos de ejecución del
algoritmo de control son muy parecidos y están por el orden de los
milisegundos.
Paralelamente, el programa principal,
ejecuta otro algoritmo, el cual toma los datos almacenados por el algoritmo de
control, y va graficando cada segundo las variables del sistema de control;
este algoritmo encargado de graficar los datos en la interfaz gráfica, es
ejecutado cada segundo y éste tarda en mostrar las gráficas unos 874 ms.
En cuanto al uso del procesador por parte
de Python, cuando se ejecuta el programa principal, únicamente ejecutando el
algoritmo de control, Python usa un 0.3 % de la CPU, mientras que ejecutar el
programa completo, o sea graficando y ejecutando el algoritmo de control, el
uso de la CPU asciende al 12 %.
La frecuencia de trabajo del procesador se
deja por defecto a la que trae la Raspberry Pi 2 B+, la cual es de 900 MHz.
CONCLUSIONES
Se puede concluir que la mejor estrategia
de control que se desarrolló en el sistema embebido fue la del controlador PI,
ya que este controlador presentó un tiempo de asentamiento menor de la variable
controlada, respecto a los otros dos controladores. Además, se controló con
mayor precisión la temperatura con este controlador; el controlador P presenta
un error de estado estacionario que es una desventaja si se pretende controlar
con gran precisión la temperatura, y el controlador PID tiene una leve
desviación debido al ruido generado en la etapa de conversión analógica
digital.
Finalmente, en cuanto al tiempo de
ejecución del algoritmo, el que presentó un mejor tiempo es el controlador PI;
los controladores P y PID tienen un tiempo muy similar, aunque no hay una
diferencia muy notable entre los tres tiempos calculados para cada controlador.
El comportamiento abrupto y los picos que
se observan en la acción de control calculada por el controlador PID son debido
al ruido inherente del conversor analógico digital del Arduino UNO; este efecto
de ruido se puede mitigar un poco leyendo varias veces la entrada y promediando
estas lecturas, aunque esto implica utilizar más tiempo en la ejecución del
algoritmo de control. Este ruido es amplificado por la alta ganancia derivativa
del controlador lo que representa estos picos agresivos en la ejecución de la
acción de control, que pueden ocasionar daños en la planta. Si bien la lenta
respuesta del proceso hace que este comportamiento inestable de la acción de
control no afecte la variable controlada, sí es importante considerar utilizar
un conversor analógico digital que tenga una mayor precisión en la conversión
para mejorar el cálculo de la acción de control y evitar este comportamiento no
deseado.
El uso del Arduino UNO como conversor
analógico digital, aunque es una opción viable debido al bajo costo del
dispositivo, se debe considerar con detenimiento, ya que la resolución con la
cual se envían los datos leídos a la Raspberry Pi es de 8 bits, además existe
ruido inherente a la conversión que genera error en la conversión; también, la
máxima velocidad de transmisión del protocolo de comunicación I2C del Arduino
UNO es de 100 kHz. Si se requiere mejorar en alguno de estos aspectos, es
posible utilizar conversores analógicos digitales que tengan una mayor
precisión y resolución de conversión, y que tengan mayor velocidad de
transmisión, lo cual se vería reflejado en un aumento en la precisión de la
lectura del sensor, mejora en el cálculo de la acción de control e inclusive
disminuir la velocidad de ejecución del algoritmo de control, todo esto con el
fin de lograr implementar estrategias de control para sistemas de respuesta
rápida.
Lo más destacable de implementar
estrategias de control clásico en el sistema embebido es la facilidad de
reprogramar el controlador, además, de modificar los parámetros con el fin de
poder visualizar como afectan estos cambios en la dinámica del sistema de
control.
El buen desempeño de los controladores
clásicos implementados para ejecutar el control del sistema térmico, junto con
el buen rendimiento del procesador, deja la puerta abierta a la idea de
implementar sistemas de control inteligente, como controladores de lógica
difusa, algoritmos genéticos, etc.; inclusive, se puede pensar en implementar
sistemas de múltiples entradas y múltiples salidas (MIMO) ya que es posible
usar más de una entrada analógica y más de una salida digital por PWM del
Arduino UNO, o si es el caso, pensar en utilizar otros dispositivos para
realizar la conversión analógico digital con el fin de mejorar la robustez del
hardware del sistema embebido.
El uso de tecnologías de código abierto
como Python y el software de Arduino, y de hardware libre como la Raspberry Pi
y el Arduino, hace posible pensar en implementar nuevas tecnologías que
permitan desarrollar estrategias de control en sistemas industriales con la
viabilidad de reducir costos por el uso de licencias de fabricantes, factores
que hacen que se incrementen los costos de un proyecto.
REFERENCIAS
[1] "The Raspberry Pi computer
goes on general sale BBC News", BBC News, 2012. [Online].
Available: http://www.bbc.com/news/technology-17190918. Mar, 2017
[2] "Raspberry Pi FAQs - Frequently Asked
Questions", Raspberry Pi, 2017. [Online].
Available: https://www.raspberrypi.org/help/faqs/. Mar, 2017.
[3] J. Celis, C. Escobar, S. Sepúlveda, S.
Castro, B. Medina, J. Ramírez, "Control adaptativo para optimizar una
intersección semafórica basado en un sistema embebido", Ingeniería y
Ciencia, vol. 12, no. 24, pp. 169-193, 2016.
[4] A. Ghosh, "Intelligent appliances controller using
Raspberry Pi", 2016 IEEE 7th Annual Information Technology, Electronics
and Mobile Communication Conference (IEMCON), 2016.
[5] M. Kalúz, Ľ. Čirka, R. Valo and M. Fikar, "ArPi
Lab: A Low-cost Remote Laboratory for Control Education", IFAC
Proceedings Volumes, vol. 47, no. 3, pp. 9057-9062, 2014.
[6] C. Micklisch and H. ElAarag, "RapiBaBot: A solution
to the inverted pendulum using a raspberry Pi and its GPIO", IEEE
SOUTHEASTCON 2014, 2014.
[7] R. Ponguillo, C. Medina, "Using open source
embedded hardware and software tools in automatic control from mathematical
model", Lecture Notes in Engineering and Computer Science, vol.
2225, pp. 333-337, 2016.
[8] C. Yu, Autotuning of PID controllers, 1st ed. London: Springer, 2006, p. 3.
[9] O. Hernández, F. Moreno, J. Becerra, Control
de procesos térmicos, 1st ed. Bogotá, D.C.: Universidad Francisco de Paula
Santander, pp. 106-111.
[10] L. García Jaimes, Control Digital.
Teoría y Práctica., 2nd ed. Medellín: Politécnico Colombiano JIC, 2010, pp.
189-195.
[11] V. Alfaro, "Identificación de
procesos sobreamortiguados utilizando técnicas de lazo abierto", Revista
Ingeniería, vol. 11, no. 1-2, Ene-Dic, 2011.
[12] A. Roca, Control automático
de procesos industriales, 1st ed. Ediciones Díaz de Santos, 2014,
pp. 84-88.
[13] "System Identification Toolbox Documentation -
MathWorks United Kingdom", Mathworks.com, 2017. [Online].
Available: https://www.mathworks.com/help/ident/. Apr- 2017.
[14] C. Smith and A. Corripio, Control automático de procesos,
1st ed. México, D.F.: Limusa, 2001.
[15] "Open PID Tuner for PID tuning - MATLAB pidTuner -
MathWorks United Kingdom", Mathworks.com, 2017. [Online].
Available: https://www.mathworks.com/help/control/ref/pidtuner.html. Apr- 2017.
[16] V. Alfaro Ruíz, "Métodos de
sintonización de controladores pid que operan como reguladores", Revista
Ingeniería, vol. 12, no. 1-2, Ene-Dic, 2011.
[17] L. Rueda, J. Barrero, C. Duarte, “El
conmutador inteligente de potencia y la sub-medición por circuito como herramientas
para la gestión energética residencial,” Rev. UIS Ing., vol. 16, no. 1,
pp. 35-46, 2017.