Aplicación de
técnicas de desenvolvimiento de producto para el desarrollo de un robot
antropomórfico
Application of
product development techniques for the development of an anthropomorphic robot
Cristhian
Riaño-Jaimes1, César Peña-Cortés2, Heller Sánchez-Acevedo3
1Departamento de Ingeniería
Mecánica y Mecatrónica, Universidad de Brasilia, Brasil. Email: cristhianivanrj@aluno.unb.br
Programa de Ingeniería Mecatrónica, Universidad de Pamplona,
Colombia. Email: cesarapc@unipamplona.edu.co
Grupo de Investigación en Energía y Medio Ambiente-GIEMA, Escuela
de Ingeniería Mecánica, Universidad Industrial de Santander, Colombia. Email: hgsanche@uis.edu.co
RESUMEN
Los proyectos robóticos involucran
componentes enmarcadas dentro de áreas como mecánica, electrónica control y
programación en las que intervienen diferentes variables críticas que pueden
comprometer la obtención de los resultados esperados. En este proyecto un gran
número de requerimientos fueron formulados para ser satisfechos con recursos
limitados, lo que obliga a tener un escaso margen de error en su fabricación.
Técnicas usadas en el desenvolvimiento de producto fueron empleadas para
conseguir cumplir con las especificaciones exigidas para el proyecto. El
artículo describe el desarrollo de un robot en las etapas de proyecto
informacional, proyecto conceptual, proyecto detallado y fabricación. Se presentan
las consideraciones de diseño estudiadas y analizadas para obtener un brazo
robótico funcional que ejecuta tareas de agricultura. Fueron empleadas técnicas
como QFD (Quality Function Development) para trasladar las necesidades
asociadas al proyecto en decisiones de ingeniería. Se emplea el diagrama de
Mudge (matriz de análisis de valor) como método de comparación y jerarquización
de los requisitos. Con la aplicación de QFD los requerimientos del robot son
transformados en características de calidad que permiten generar un proyecto
conceptual con los métodos y actividades a ejecutar. Los resultados obtenidos
mostraron la efectividad de emplear herramientas de diseño para concebir
proyectos robóticos y focalizar los recursos en satisfacer los requerimientos.
PALABRAS
CLAVE: Arquitectura
sustentable; diseño conceptual; QFD (despliegue de la función de calidad);
robótica; TRIZ (teoría de la resolución de problemas inventiva).
ABSTRACT
Robotic projects
involve components framed within areas such as electronics; mechanics, control
and programming in which different critical variables intervene that can
compromise the achievement of the expected results. In this project, numerous
requirements were formulated to be satisfied with limited resources, which
forces to have a small margin of error in its manufacture. Techniques used in
product development were used to achieve the required specifications for the
project. The article describes the development of a robot in the stages of
informational project, conceptual project, detailed project and manufacturing.
They are presented design considerations studied and analyzed to obtain a
functional robotic arm running tasks agriculture. Techniques such as QFD
(Quality Function Development) were used to translate the needs associated with
the project into engineering decisions. The Mudge diagram (value analysis
matrix) is used as a method of comparison and hierarchy of requirements. With
the application of QFD the requirements of the robot are transformed into
quality characteristics that allow to generate a conceptual project with the
methods and activities to execute. The results showed the effectiveness of
using design tools to create robotic systems and to focus resources on
satisfying the requirements.
KEYWORDS: Conceptual design; QFD (Quality Function
Development); sustainable architecture; robotics; TRIZ (theory of inventive
problem solving).
INTRODUCCIÓN
La mayoría de los problemas que enfrenta
el ser humano están siendo abordados desde distintas perspectivas tecnológicas.
El campo de la robótica aporta soluciones para distintos sectores que van desde
la parte de robótica de servicios: aplicaciones médicas [1], plataformas
móviles [2-3], educacional, espacial, entre muchos otras hasta el sector
industrial, que recibe grandes recursos destinados para el desarrollo de
proyectos. El problema común que enfrenta el desarrollo de un nuevo robot
consiste principalmente en encontrar un conjunto de acciones para ejecutar, que
proporcionen una solución que satisfaga las necesidades del problema, buscando
el mejor aprovechamiento de los recursos disponibles.
Los esfuerzos iniciales en este proyecto
se centraron en generar un plan de acciones que permitan desarrollar un robot
que ejecute tareas agrícolas [4]. El problema de diseño se torna complejo cuando en un sistema
robótico existen soluciones fuertemente acopladas como son por ejemplo la
relación entre peso de un eslabón (componente mecánica) y el torque que debe
garantizar el lazo de control de posición (componente electrónica y control).
El grado de correlación entre ellas hace necesario emplear metodologías que
faciliten la fragmentación del problema y encontrar los principios de solución
que permitan satisfacer los dos requerimientos. El sistema robótico propuesto
está compuesto por tres grandes componentes, mecánica, electrónica y control;
abordadas de manera global y llevadas a solución de detalle.
El concepto de desenvolvimiento de
producto ya tiene un recorrido de expansión a lo largo de sus últimos 35 años
por la efectividad demostrada en la concepción de productos de consumo [5]. Resultados han sido ampliamente
publicados y trasladados a otros escenarios de aplicación [6]. El objetivo perseguido es obtener
por medio de herramientas y metodologías de diseño de producto, un planeamiento
para el desarrollo del robot. El planeamiento conducirá la ejecución de las
etapas de diseño, desarrollo y fabricación usando los recursos disponibles,
focalizando los esfuerzos, reduciendo el tiempo en encontrar soluciones,
evitando pérdidas, y especialmente cumpliendo con los objetivos trazados para
la investigación.
La fase de estudio y diseño en el ciclo
de vida de un producto es quizás la más importante y la que requiere mayor
atención. Los resultados de esta fase definirán las actividades a ejecutar y el
éxito del proyecto. Es importante hacer una investigación exhaustiva y
constante para encontrar distintas alternativas de solución. Esta investigación
parte de una revisión sobre soluciones robóticas integradas en la agricultura,
considerando distintas configuraciones robóticas como son: móviles, de cadena
cinemática abierta y cadena cinemática cerrada de las que se puedan extraer
experiencias.
La siguiente fase del proyecto “sistema
robótico para aplicaciones agrícolas” es concebir un robot con múltiples tareas
que se integre perfectamente con otras tecnologías y sirva de plataforma para
generar soluciones robóticas en el área agrícola.
La “arquitectura sustentable” o también
llamada “arquitectura verde” que consiste principalmente en integrar recursos
naturales con edificaciones de manera sostenible, demanda para su masificación
grandes lotes de cultivos con diversos tipos de plantas. Se perseguí en este
proyecto concebir una plataforma robótica aplicada para asistir de forma
autónoma un cultivo de plantas con posibilidad de escalamiento.
En este documento se presenta de manera
detallada las actividades de estudio y diseño desarrolladas para crear el robot
agrícola, usando metodologías de diseño de producto QFD y métodos para búsqueda
de soluciones como el TRIZ (theory of inventive
problem solving). En la sección dos se exponen
los requisitos de proyecto obtenidos de las necesidades identificadas en cada etapa
del ciclo de vida del robot funcional. La sección tres se presenta la
aplicación de despliegue de la función de calidad y la descripción de las
matrices asociadas con la metodología. En la sección cuatro se presenta la fase
de desarrollo y construcción del robot para finalizar con la presentación de
resultados y conclusiones del trabajo.
REQUISITOS DEL USUARIO FINAL DEL ROBOT
En este apartado se definen los
requerimientos del usuario, se organizan y se estructuran de cara al
planteamiento de la solución.
Ciclo de vida del robot e identificación de los usuarios
Para definir las necesidades de los
usuarios, asociados al proyecto, es preciso identificar los clientes de cada
una de las etapas del ciclo de vida [7]. En la Figura 1, se muestra las etapas del ciclo de vida
consideradas para el proyecto “robot para aplicaciones agrícolas” y los
clientes asociados a cada una de ellas. Las necesidades son dadas para cada
etapa después de un estudio directo de la voz de los clientes [8].
Definir exactamente las necesidades de
los clientes en cada una de las etapas de ciclo de vida es fundamental para
aplicar cualquier metodología de diseño del proyecto.

Figura 1.
Relación de clientes con el ciclo de vida del robot para aplicaciones
agrícolas. Fuente. Elaboración propia.
La definición de las necesidades requiere
de un estudio enfocado en cada una de las áreas que abarcan el desarrollo del
proyecto. La mejor manera de establecer las necesidades es con una investigación
directa de los usuarios finales, a través de técnicas estructuradas de
investigación de mercado. Las necesidades identificadas para el desarrollo del
robot para aplicaciones agrícolas son presentadas en la Tabla 1.
Tabla 1.
Necesidades relacionadas con el robot para aplicaciones agrícolas.
|
Necesidades asociadas al robot de
aplicaciones agrícolas
|
|
Ciclo de Vida
|
Necesidades de los Usuarios
|
|
Planeamiento de proyecto
|
Espacio de trabajo adecuado para
cultivos en interiores.
|
|
Planeamiento de proyecto
|
Garantizar las mismas condiciones de
trabajo para un periodo de tiempo definido.
|
|
Planeamiento de proyecto
|
Capacidad de proporcionar el mismo
resultado para cada ciclo de operación.
|
|
Planeamiento de proyecto
|
Bajo costo de fabricación y de forma
escalable.
|
|
Planeamiento de proyecto
|
Estructura que facilite la precisión y
proporcione alta estabilidad.
|
|
Planeamiento de proyecto
|
Proporcionar un prototipo virtual para
análisis y simulaciones.
|
|
Planeamiento de proceso
|
Trabajar con las maquinas disponibles
en el laboratorio.
|
|
Planeamiento de proceso
|
Control correctamente sintonizado y
tolerante a interferencias y perturbaciones.
|
|
Montaje y embalaje
|
Usar para el ensamble herramientas
comunes.
|
|
Almacenamiento y transporte
|
Fácil de trasportar y embalar.
|
|
Almacenamiento y transporte
|
Materiales resistentes para soportar
traslados.
|
|
Uso del robot
|
Robot visualmente agradable y diseño
relacionado con el entorno de trabajo.
|
|
Uso del robot
|
Bajo consumo de energía.
|
|
Uso del robot
|
Adaptable para ejecutar diferentes
tareas.
|
|
Uso del robot
|
Tecnológicamente compatible para
adherir nuevas tecnologías.
|
|
Uso del robot
|
Operación con bajo ruido y vibraciones.
|
|
Mantenimiento, actualización
y reciclaje
|
Componentes estándar y comercialmente
asequibles.
|
|
Mantenimiento, actualización
y reciclaje
|
Componentes fáciles de intercambiar.
|
|
Mantenimiento, actualización
y reciclaje
|
Facilidad para desmontar.
|
|
Mantenimiento, actualización
y reciclaje
|
Fácil de descartar.
|
Fuente. Elaboración propia.
Cada fase del ciclo de vida del robot
funcional presenta unas necesidades específicas de satisfacer. En la fase de
planeamiento del proyecto se especifican las necesidades requeridas os
especificaciones deseadas para el robot funcional en la ejecución tareas de
agricultura. La aplicación de agricultura contemplada para el trabajo del
robot, consiste en asistir de forma autónoma un cultivo de plantas usadas en la
“arquitectura sustentable” con la posibilidad de obtener escalamiento de los
cultivos. Otros conjuntos de necesidades son obtenidos de la fase de
fabricación y ensamble. Estas necesidades definirán desde el diseño, el tipo de
herramientas a utilizar, selección de partes estandarizadas y la manera de
hacer tareas de mantenimiento. Finaliza con la definición de necesidades
relacionadas a la proyección de vida útil donde se crean posibilidades de
actualización e inclusión de nuevas tecnologías y como realizar el descarte o
reutilización de partes en otros proyectos.
Requisitos de proyecto
Con los procedimientos realizados en la
sección anterior para definir las necesidades asociadas al proyecto presentadas
en la Tabla 1, y teniendo en cuenta que esa información reúne las necesidades
de todas las etapas de ciclo de vida, es necesario hacer un mapeo de ellas para
transformarlas en requisitos de proyecto.
El proceso de mapear las necesidades de los
clientes a requisitos de proyecto es hecho para definir las propiedades físicas
finales del robot. La definición correcta de estas propiedades físicas
garantiza que se satisfagan todas las necesidades y especificaciones deseadas.
Un lenguaje de ingeniería es usado para definir cada uno de los requisitos de
proyecto. Utilizando este lenguaje permite que cada requisito de proyecto sea
asociado a una característica técnica o expresión medible y verificable [9].
Los requerimientos de proyecto que
representan las necesidades son presentados en la Tabla 2.
Diagrama de Mudge
Con los requisitos definidos en la Tabla 2,
la siguiente actividad en la metodología, es establecer el grado de importancia
o peso de cada requerimiento. Los requerimientos definidos representan las
necesidades, pero algunas de estos demandan un nivel de atención mayor y en ese
orden, se debe emplear una técnica correcta para definir el grado de
importancia.
El diagrama de Mudge es una herramienta que
permite la comparación de los requerimientos de proyecto con el objetivo de
generar una jerarquía de ellos, de acuerdo a su grado de importancia y
relevancia en el proyecto.
La comparación en el diagrama de Mudge ha
sido realizada atribuyendo un valor en cada evaluación de las funciones. El
método consiste en responder dos preguntas cuando se hace una comparación entre
dos funciones. 1) ¿Cuál de las dos funciones es más importante? 2) Dentro de
una escala predefinida ¿cuál es el valor de importancia?. La escala utilizada
para definir el grado de importancia contempla valores entre 1 y 5, donde 5 es
el mayor y 1 el menor grado de importancia. Estos valores son representados por
las letras A,B,C,D,E con valores respectivos de 5,4,3,2,1.
En la Figura 2 se presenta el diagrama de
Mudge. Se puede apreciar en la parte inferior izquierda, la escala
predeterminada de eficiencia para definir el grado de importancia. Existe una
columna que almacena el resultado de sumar los valores obtenidos de la
evaluación de cada requerimiento llamada “suma” y su equivalencia en porcentaje
[10].
Tabla 2. Requisitos de proyecto.
|
Requisitos de proyecto
|
|
Funciones
|
Requerimientos del proyecto
|
|
1
|
Fabricación de bajo costo.
|
|
2
|
Estructura resistente.
|
|
3
|
Herramienta intercambiable.
|
|
4
|
Fácil mantenimiento.
|
|
5
|
Área de trabajo apropiada.
|
|
6
|
Visualmente agradable.
|
|
7
|
Consumo de energía bajo.
|
|
8
|
Alta precisión.
|
|
9
|
Nivel de protección adecuado para el
entorno de trabajo.
|
|
10
|
Control de posición y seguimiento de
trayectoria.
|
|
11
|
Fácil fabricación.
|
Fuente. Elaboración propia.
Diagrama de Pareto
Para un mejor análisis de los resultados
obtenidos después de aplicar el diagrama de Mudge, se presenta en la Figura 4
el diagrama de Pareto. Este diagrama es una herramienta para análisis gráfico
que facilita la selección de los requerimientos más relevantes del problema,
para enfocar los recursos en la satisfacción de ellos. Con el análisis podemos
llegar a la conclusión que el 20% de las causas son responsables del 80% de los
resultados y que existen una cantidad de actividades triviales que debemos
identificar para focalizar los recursos en las actividades que más influencia
tienen.
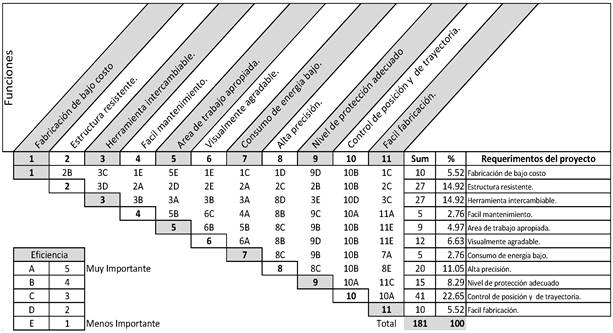
Figura 2. Diagrama de Mudge para el
robot para aplicaciones agrícolas. Fuente. Elaboración propia.
El diagrama de Pareto es construido con
la información contenida en la Figura 3, que resume los cálculos de análisis
necesarios para construir el diagrama. La columna % es obtenida por medio de
la ecuación (1) usando los valores del diagrama de Mudge. La columna
“acumulado” se obtiene a través de la ecuación (2).
|
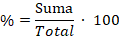
|
(1)
|
|

|
(2)
|
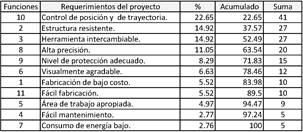
Figura 3. Resumen de los cálculos en el
análisis de Pareto.
El objetivo de utilizar el diagrama de
Pareto es proporcionar una forma alterna para observar el grado de importancia
de cada requerimiento. Este permite enfocar recursos y esfuerzos en la
satisfacción de requerimientos que acercan a la solución deseada. También ayuda
en la toma de decisiones relacionadas con el desarrollo del proyecto.
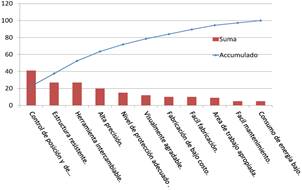
Figura 4. Diagrama de Pareto del robot para aplicaciones agrícolas.
Las barras en la Figura 4 representan
cada uno de los requerimientos del robot y el valor resultante de la
comparación con los otros requerimientos obtenidos con en el diagrama de Mudge.
La curva indica los acumulados que van ascendiendo hasta el valor de 100 por
ciento.
La ventaja de aplicar este método radica
en que con una observación sobre la Figura 4 se puede deducir que, si se aplica
el mayor de los esfuerzos y recursos en la satisfacción de los primeros 6
requerimientos, el proceso está un 80 por ciento más cerca de encontrar la
solución a las necesidades planteadas por los clientes del robot agrícola.
APLICACIÓN DESPLIEGUE DE LA FUNCIÓN DE CALIDAD
Para continuar con la fase de estudio y
diseño del robot agrícola, se emplea la metodología de despliegue de la función
de calidad QFD, como método para guiar las siguientes actividades en el
desarrollo del robot agrícola. Esta metodología recopila los requerimientos y
necesidades del robot y las despliega en un conjunto de características
técnicas y operativas conducentes a crear un concepto del producto que
satisface los requerimientos [11].
La metodología más que proporcionar datos
cuantitativos, proporciona información de carácter cualitativo, fundamental
para generar el concepto de diseño y explorar múltiples soluciones, que se
adapten a las características técnicas con las que se cuenta para la ejecución
de este proyecto. Estos elementos cualitativos permiten satisfacer en gran
medida los requerimientos conservando el control de recursos tales como costos
y tiempo para ejecución del proyecto.
Otro aspecto importante que motiva la
aplicación de la metodología es que permite hacer un estudio comparativo del
proyecto con desarrollos similares, fortaleciendo el concepto de diseño por
incluir la evaluación de la competencia en la etapa de estudio [12].
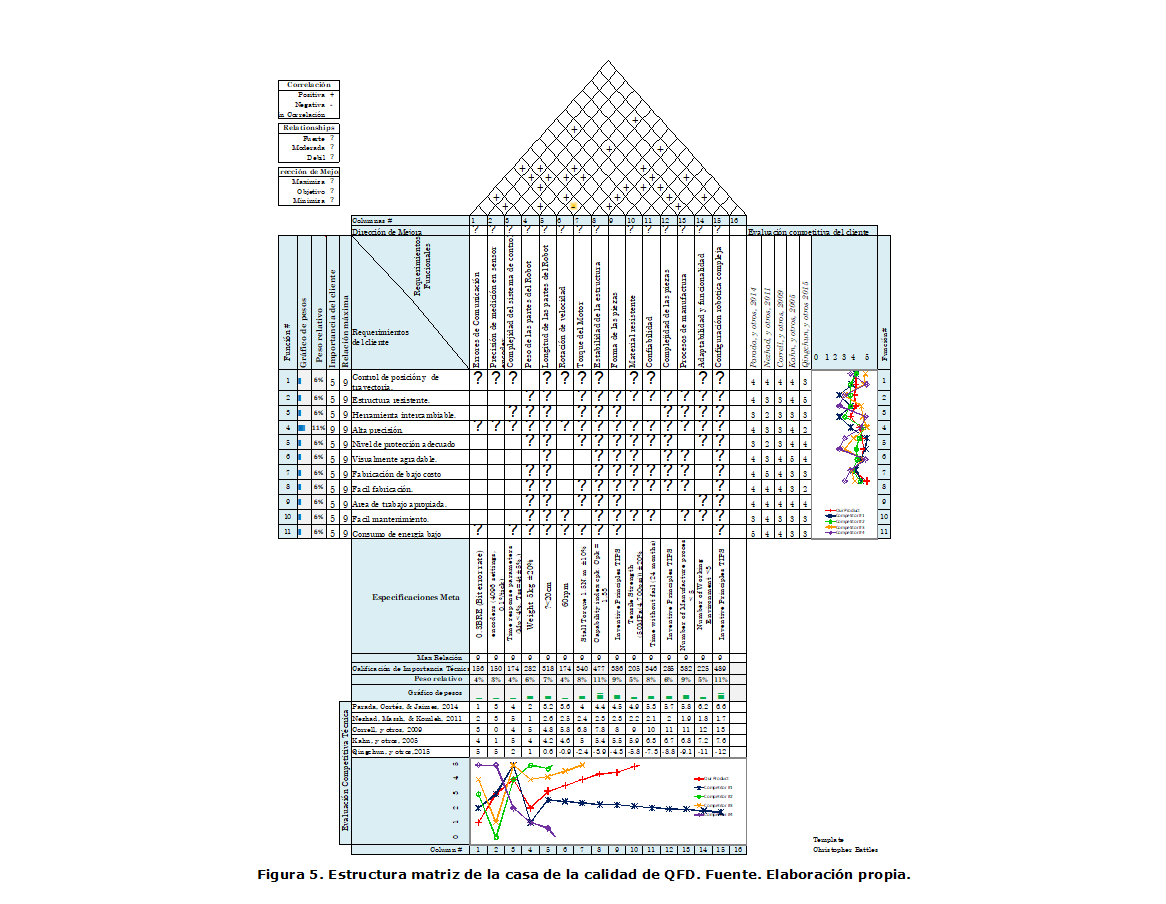
En la Figura 5 se presenta el esquema general QFD y las matrices asociadas a la
casa de la calidad. El surgimiento de este método fue atribuido a la necesidad
de incorporar un sistema de calidad en los diseños y definir los tiempos para
realizar el control de procesos. Con la elaboración de la casa de la calidad,
argumentos como las necesidades de los clientes, análisis de proyectos
similares, necesidades del equipo de fabricación y correlación entre los
requerimientos de proyecto son incorporados y trasladados a la solución final [8].
A continuación, se presentan cada una de las matrices que componen el
despliegue de la función de calidad.
Matriz de requerimientos del proyecto y análisis de
competencia
El origen y estudio de los requerimientos
del proyecto para el robot agrícola fueron presentados en el apartado anterior.
Estos requerimientos conforman la primera matriz de la metodología. La matriz
de importancia, es conformada por los pesos de los requerimientos del proyecto
definidos en una escala de 1 a 5, también obtenidos en el apartado anterior con
la aplicación del diagrama de Mudge.
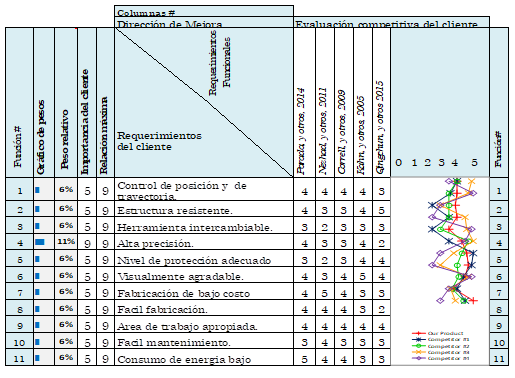
Figura 6. Requerimientos del proyecto y Benchmarking competitivo.
Fuente. Elaboración propia.
En la Figura 6 se presenta la matriz de
requerimientos, el grado de importancia y el análisis de la competencia. Se
hace un estudio comparativo de seis proyectos que mantienen relación con el
robot a desarrollar. En ese estudio fue incluido un primer prototipo de brazo
robótico para evaluar el comportamiento frente a cada uno de los requerimientos
[13]. El resultado de este benchmarking competitivo se resume en
evaluaciones dentro de una escala de 1 (menor evaluación) a 5 (mejor
evaluación), y presentado en la Figura 6.
Requisitos de producto
Los requerimientos de producto para el
robot sembrador, son definidos en función de criterios de ingeniería, que
permiten verificar el cumplimiento de cada una de las necesidades a través de
mediciones sobre estas variables. La definición de estos requerimientos en
unidades de ingeniería permite crear expresiones medibles para cuantificación y
verificación. En cada requisito de proyecto puede definirse uno o más elementos
de producto (sistema, sub-sistema, componente, característica o función) en el
que cada elemento tiene asignada una variable medible también conocida como
característica técnica de calidad del producto [14, 8].
Para determinar los requerimientos del
proyecto, de forma adecuada, se busca aprovechar la relación que existe entre
TRIZ (Tieoriya Riesheniya Izobrietatielskij Zadach) y la metodología QFD
(Quality Function Developed), principalmente para apoyar la definición
de las especificaciones del proyecto y la eliminación de las contradicciones
asociadas a los parámetros de ingeniería. La Teoría para Resolver Problemas de
Inventiva TRIZ o su acrónimo en inglés TIPS (theory of inventive problem
solving), proporciona una lista de parámetros de ingeniería comunes en
muchos problemas de diseño que conducen a crear una característica medible de
calidad. También la teoría proporciona unos principios de solución inventivos
útiles para encontrar una solución análoga en problemas con algún grado de
acoplamiento. En la Figura 7 se presenta los requisitos de proyecto.
Matriz de correlación
La matriz de correlación tiene una
función importante dentro de la metodología, a través de ella se identifican
las especificaciones de desempeño del sistema que tienen algún tipo de
acoplamiento. La identificación temprana de los requisitos acoplados, permite
explorar soluciones que conducen a eliminar la correlación. La evaluación de la
matriz está hecha con base en una interrelación de los requisitos de producto
para identificar el grado de dependencia. Se identifica no solo la relación
sino también la dirección de esa relación. Se emplean tres criterios para
realizar esta correlación:
·
Correlación positiva: Es la relación de dos
requisitos de producto que ambos aumentan o disminuyen simultáneamente.
·
Correlación negativa: Es la relación de dos
requisitos de producto que presentan una dependencia directa. Es una relación
que es inversamente proporcional y constante que se interpreta que al aumentar
ese requerimiento de proyecto afecta disminuyendo el otro.
·
Correlación nula: Cuando no existe ninguna
relación clara de dependencia de esos dos requisitos de producto.
En la Figura 8 se presentan los
diferentes criterios utilizados para evaluar y generar las matrices de
relacionamiento, dirección y correlación de la casa de calidad o método QFD.
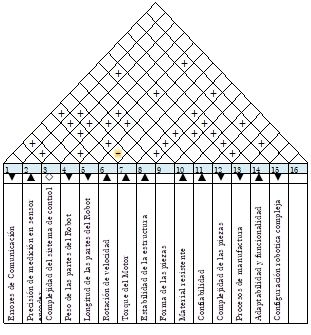
Figura 7. Requisitos de producto y matriz de correlación para el robot de
aplicaciones agrícolas. Fuente. Elaboración propia.
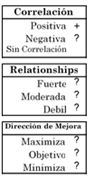
Figura 8
Criterio de evaluación para las matrices de correlación, relacionamiento y
dirección. Fuente. Elaboración propia.
La correlación es presentada en la Figura
7 y conforma el techo de la casa de la calidad. Se puede observar una
correlación negativa entre dos requerimientos, el sistema precisa de motores de
alto torque, pero a su vez dar velocidad para la rotación de las
articulaciones.
Matriz de relacionamiento
La matriz de relacionamiento indica de
forma cualitativa, en cuánto cada requisito de proyecto afecta cada
requerimiento de cliente. Esta cualificación es realizada a través de un grado
de relacionamiento dividido en tres criterios:
·
Fuertemente relacionado.
·
Relacionado moderadamente.
·
Débilmente relacionado.
En la Figura 9 se presenta la matriz de
relacionamiento generada para los requisitos del cliente y los requisitos de
producto.
Especificaciones meta
Las especificaciones meta para el
proyecto son presentadas en la Tabla 3.
Las especificaciones se interpretan como
acotaciones específicas del proyecto y representan las características de
calidad perseguidas con el robot. Para fijar estas especificaciones se
contemplan los recursos técnicos y físicos que se disponen para el desarrollo
del proyecto.
Tabla 3. Especificaciones Meta.
|
Especificaciones (Meta)
|
|
Requerimientos
|
Especificaciones
|
|
Errores de Comunicación
|
0.3BRE (Tasa error en Bit)
|
|
Precisión de medición en sensor encoder
|
12-bit Encoder magnéticos
(4096 Configuración, 0.1°/tick)
|
|
Complejidad del sistema de control
|
Parámetros de tiempo de respuesta
(Mp < 4%, Tss=4_)
|
|
Peso de las partes del Robot
|
Peso 5kg ±20%
|
|
Longitud de las partes del Robot
|
Longitud < 20cm ±10%
|
|
Rotación de velocidad
|
60rpm ±10%
|
|
Motor torque.
|
Torque 1.5N.m
|
|
Estabilidad de la estructura
|
-
|
|
Forma de las piezas
|
Principios inventivos basados en TIPS.
|
|
Material resistente
|
Resistencia a la tracción (50MPa
(4,700psi))
|
|
Confiabilidad
|
Tiempo sin fallas (24 meses)
|
|
Complejidad de las piezas
|
Principios inventivos basados en TIPS.
|
|
Procesos de manufactura
|
Número de procesos de manufactura <
5
|
|
Adaptabilidad y funcionalidad
|
Número de entornos de trabajo <3
|
|
Configuración robótica compleja
|
Principios inventivos basados en TIPS.
|
Fuente. Elaboración propia.
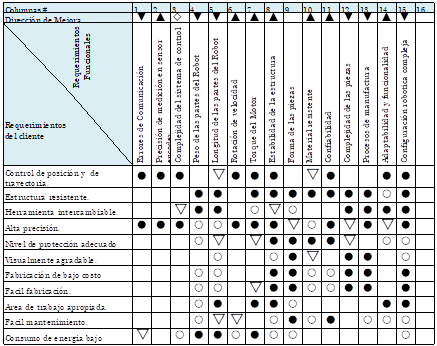
Figura 9. Matriz de relacionamiento para
el robot de aplicaciones agrícolas. Fuente. Elaboración propia.
Cuantificación de los requisitos del producto
En esta matriz se
presenta el resultado obtenido de aplicar la técnica QFD para encontrar el
mejor camino que conduzca a satisfacer las necesidades del cliente. En la
Figura 10 se presenta la matriz.
Al analizar la figura se
puede observar el peso y grado de importancia de los requerimientos del
producto. Esta información es relevante para el planeamiento y desarrollo del
proyecto. Con la información extraída de la metodología QFD se realizó una
asignación equitativa de los recursos y se enfocaron los esfuerzos en los
requerimientos que presentan mayor relevancia [15].
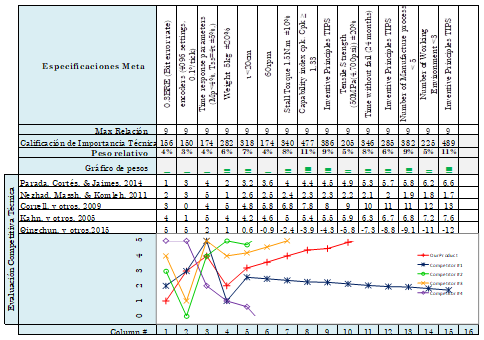
Figura 10. Matriz de cuantificación de
los requisitos del producto. Fuente. Elaboración propia.
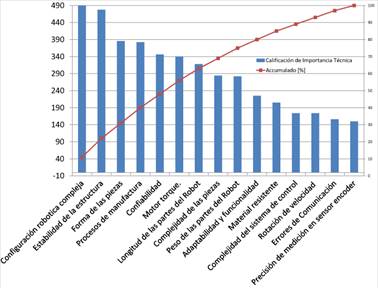
Figura 11. Resultado en orden de
importancia de los requerimientos funcionales con metodología QFD. Fuente.
Elaboración propia.
Las características de producto se
presentan en orden de importancia a través de diagrama de Pareto presentado en
la Figura 11, para facilitar el análisis. En el diagrama se observa que, si se
enfocan los recursos en las causas vitales, características con mayor grado de
relevancia, esto permitirá lograr la mayoría de los beneficios potenciales.
DESARROLLO DEL PROYECTO
En el desarrollo del proyecto se toman
los resultados de la matriz QFD y se abordan con profundidad cada uno de los
requerimientos funcionales, con el objeto de generar el diseño conceptual que
contenga la ingeniería de detalle asociada a cada solución [16]. Para presentar
la ingeniería de detalle de la solución, se construye un prototipo virtual con
software de modelado CAD. Se definen aspectos de apariencia, dimensiones y
propiedades físicas para obtener el prototipo con las características físicas
reales que el robot adquirirá en su fabricación. El prototipo virtual final
obtenido es mostrado en la Figura 12.
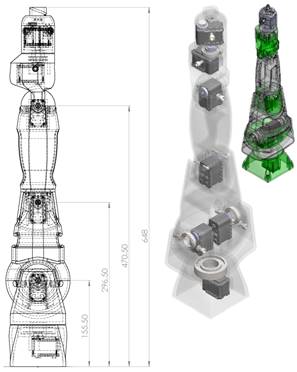
Figura 12. Prototipo virtual del brazo robótico. Fuente. Elaboración
propia.
La herramienta CAD permite modelar piezas y
conjuntos para extraer planos, lista de materiales y cualquier tipo de
información necesaria para la construcción y desarrollo del prototipo. El
proceso de crear el modelo CAD consiste en formalizar la idea dibujando las
piezas y creando ensambles para obtener simulaciones, planos, desarrollos y
distribución.
En la fabricación del prototipo del brazo
robótico se empleó el proceso de manufactura FDM (Fused Deposition Modeling).
El equipo empleado para este proceso de fabricación es la impresora 3D MakerBot
Replicator Z18.
En la Figura 13 se presenta el espacio
trabajo que abarca el brazo robótico. El volumen del espacio de trabajo es
aproximadamente 413892099.81 milímetros cúbicos con una superficie que cubre un
área de superficie de 3373138.89 milímetros cuadrados. La carga nominal
admisible del robot es de 400 gramos, las velocidades máximas de las
articulaciones de los ejes 1, 4, 5 son: 177 grados por segundo, el de las
articulaciones de los ejes 2 y 3 son: 207 grados por segundo. La velocidad
nominal u objetivo de todas las articulaciones es de 67.5 grados por segundo.
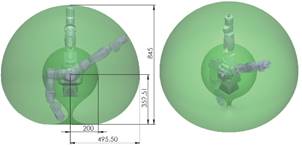
Figura 13. Representación del espacio de
trabajo del brazo robótico. Fuente. Elaboración propia.

Figura14. Robot recogiendo mezcla de
sustrato. Fuente. Elaboración propia.
En la Figura 14 y en la Figura 15 se
presenta el robot desarrollado completamente operacional en la etapa de
programación. El robot es sometido a pruebas para evaluar el cumplimiento de
los requisitos del cliente.

Figura 15. Robot vertiendo mezcla en las
materas. Fuente. Elaboración propia.
CONCLUSIONES
Se implementó una metodología para el
desarrollo de un proyecto mecatrónico que incorpora técnicas y metodologías de
diseño de producto con el objeto de interpretar las necesidades del proyecto e
incorporar soluciones conducentes a satisfacerlas.
La metodología permitida reducir el
tiempo de fabricación y realizar mejor uso de los recursos disponibles. Aunque
la etapa de diseño consumió un tiempo mayor que el usado en anteriores
proyectos, los resultados fueron favorables. Se redujo errores, se exploraron
nuevos principios de solución y se consiguió un diseño conceptual escalable
tecnológicamente y acoplable a diferentes tareas.
Las técnicas de resolución de problemas
aportaron salidas a problemas con grados de acoplamiento que satisfacen los dos
requerimientos sin tener pérdidas de desempeño. El producto obtenido, un robot
antropomórfico que cumple los requerimientos fijados e incorpora un sistema
para el intercambio de herramientas, brindándole adaptabilidad a futuras
tareas.
Se evidenció que, a pesar de que la etapa
de estudio y diseño demande una parte importante del tiempo total empleado, el
balance final es positivo, ya que la metodología retorna beneficios asociados a
la reducción de tiempo en la fabricación y ensamble, producto de la
focalización de recursos, del aprovechamiento de herramientas y condiciones
técnicas y a la reducción de pérdidas en compras innecesarias.
El artículo presenta un abordaje general
para el desarrollo de robots, basado en técnicas de resolución de problemas
como es la metodología QFD. La integración de técnicas como el diagrama de
Mudge, la matriz QFD y la teoría inventiva TRIZ para resolver problemas,
garantizan un desarrollo óptimo del proyecto.
REFERENCIAS
[1] M. F. Maradei, F. Maldonado, C.
Gómez, “Aplicación de la ergonomía en el desarrollo de un periférico de
entrada y control de datos para discapacitados,” Rev. UIS Ing., vol. 8,
no. 1, pp. 65-75, 2009.
[2] M, Suell, J. F. Archila, O. Lengerke,
“Diseño mecatrónico de un robot tipo agv automated guided vehicle," Rev.
UIS Ing., vol. 7, n. 1, pp. 65-76, 2010.
[3] H. González, C. A. Mejía, “Estudio
comparativo de tres técnicas de navegación para robots móviles,” Rev. UIS
Ing., vol. 6, n. 1, pp. 77-84, 2011.
|
[4] C. A. P. Cortés, C. I. R. Jaimes y J. A. R. Valencia, “Desarrollo
de un sistema robótico aplicado a superficies verdes en edificaciones”, Revista
de Tecnología, vol. 15, pp. 33-42, May. 2016.
|
|
[5] L.-K. Chan and M.-L.
Wu, "Quality function deployment: A literature review," European
journal of operational research, vol. 143, pp. 463-497, Dec. 2002.
[6] K. Masui, T. Sakao, M.
Kobayashi and A. Inaba, "Applying quality function deployment to
environmentally conscious design", International Journal of Quality
& Reliability Management, vol. 20, pp. 90-106, 2003.
[7] E. Cortés, E. Rodríguez, C. Riaño, R. Bonnard y C. Peña, “Enfoque
sobre o desenvolvimento de um robô com arquitetura paralela 5r para
manufatura aditiva”, IX Congresso Brasileiro de Engenharia de Fabricação -
COBEF 2017. Brasil, Jun. 2017.
[8] H. Rozenfeld
e others, “Gestão de desenvolvimento de produtos: uma abordagem para a
melhoria de processos”, Sao Paulo: Saraiva, 2006.
[9] G. &. B. Ç.
Büyüközkan, "Designing a sustainable supply chain using an integrated
analytic network process and goal programming approach in quality function
deployment," Expert Systems with Applications, vol. 38, pp. 13731-13748,
2011.
[10] H.
Kume, E. Vasco y H. Kume, “Herramientas estadı́sticas básicas para el
mejoramiento de la calidad”, Editorial Norma, 1992.
[11] H.
Rozenfeld, F. A. Forcellini e D. C. Amaral, “Gestão de desenvolvimento de
produtos: uma referência para a melhoria do processo”, Editora Saraiva, 2000.
[12] Y. Akao, "Quality
function deployment, Integrating Customer Requirements Into Product
Design" 2004.
[13] P. A.
C. Parada, C. A. P. Cortés y C. I. R. Jaimes, “Módulo robótico para la
clasificación de lulos Solanum Quitoense, implementando visión artificial”, INGE
CUC, vol. 10, pp. 51-62, 2014.
[14] Y. Akao, Hoshin Kanri:
“Policy deployment for successful TQM”, SteinerBooks, 2004.
[15] A.
&. D. S. F. C. Nieves Hurtado, “Probabilidad y Estadı́stica para
Ingenierı́a, un enfoque moderno”, México DF: McGra-Hill, 2010.
[16] L. A. B.
Mascarenhas, J. Oliveira Gomes, A. T. Portela, C. V. Ferreira e L. L. N.
Guarieiro, “Utilização da matriz morfológica para desenvolvimento da bancada
de testes de válvulas e sedes de válvulas”, 2015.
|